Cybot Navigational Robot
In my CPRE 288: Embedded Systems course, we spent the semester programming modified Roomba robots to
navigate an obstacle course of PVC pipes. Our roomba was modified, with an attached microcontroller
we could program to intruct the roomba, read and write UART and wifi signals, and read sensor data.
By reading sensor data and telling the roomba where to move, students could either remotely control
the roomba through an unknown randomized course or attempt to program it to autonomously travel
through the course.
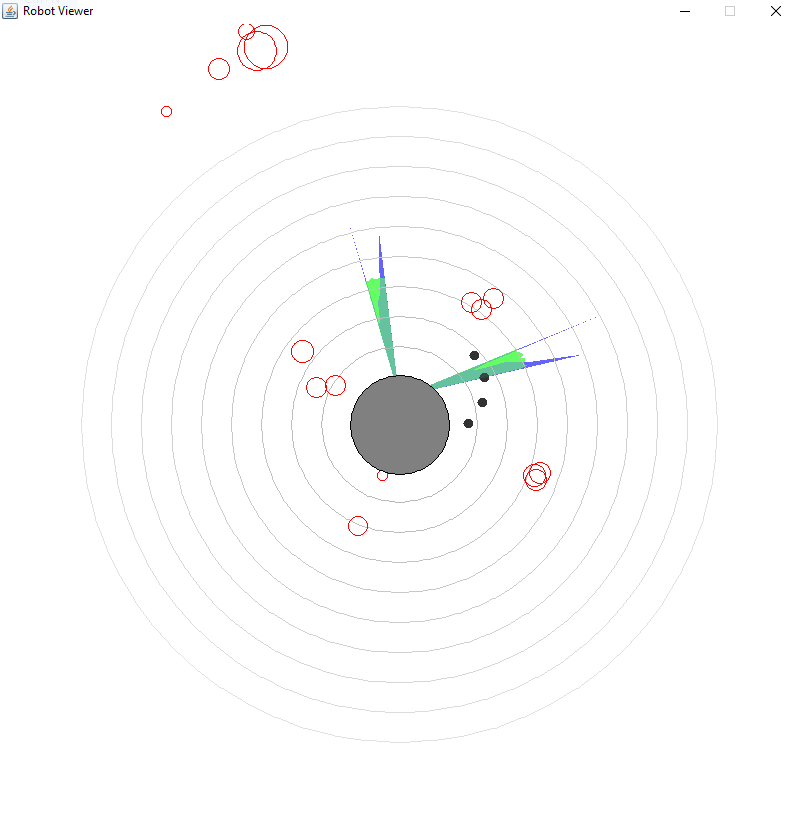
One of my great accomplishments during this course was the development of a visual display of what
the robot's sensors were reading that allowed me to traverse the obstacle course in half the time
as the next fastest robot. The roomba would send data to a Java swing application, which would then
plot where it believed pillars or obstacles existed in the obstacle course. It would also show the
elements in the obstacle course moving as the robot did, which gave us an advantage in not having to
rescan the area every time the robot moves.
Source code for the vision GUI can be found on the
project page